Fontes de Imagens :
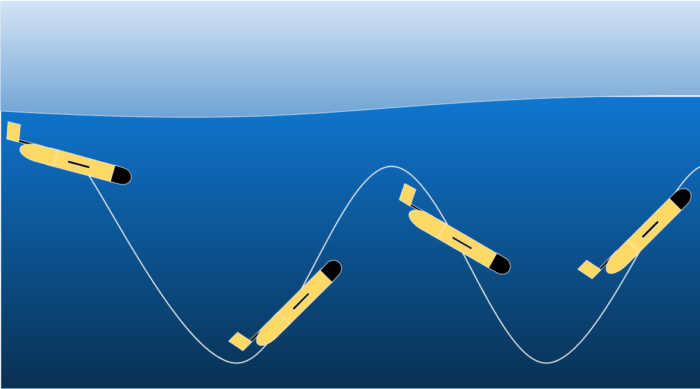
https://secoora.org/underwater-gliders-chasing-hurricane-florence/
https://earthzine.org/going-deep-to-go-far-how-dive-depth-impacts-seaglider-range/
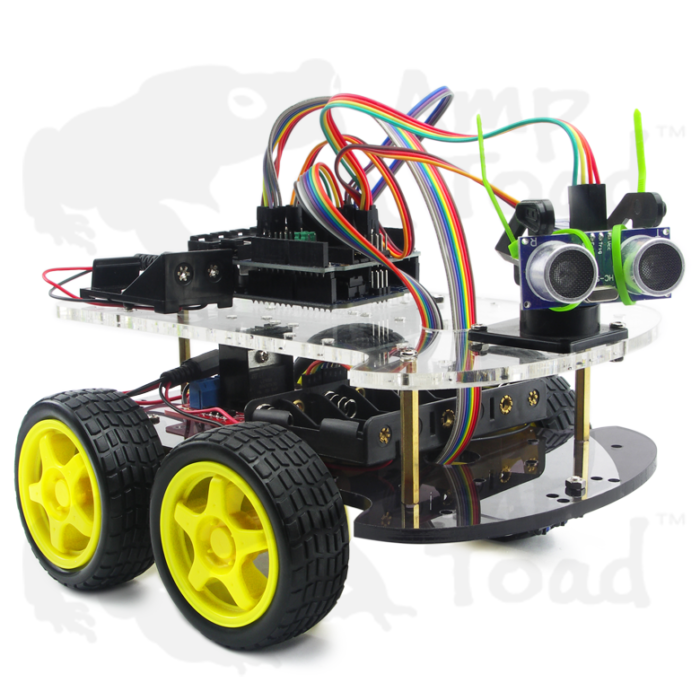
https://www.theverge.com/2018/6/28/17514134/honda-asimo-humanoid-robot-retire
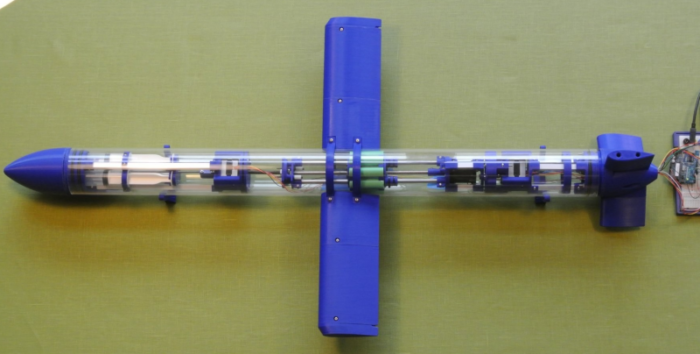
https://hackaday.com/2017/05/24/hackaday-prize-entry-underwater-glider-offers-low-power-exploration/
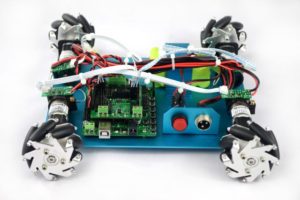
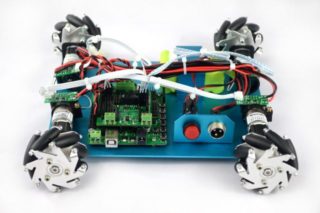
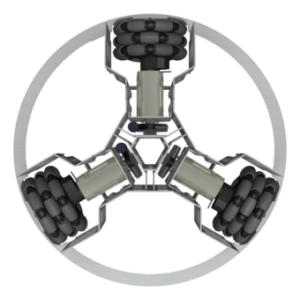
https://www.core77.com/posts/47205/Wheels-That-Permit-360-Degree-Movement—Without-Turning