Robô terrestre com pernas ou rodas . Há também locomoção com esteiras e conjuntos híbrido.
Aéreo:
Drones, aviões autônomos com diversos motores, principalmente elétricos (brushless) e hélices como sistemas de propulsão
Aquático:
Grande variedade: submarinos autônomos, AUVs , veículos de superfície, peixes artificiais biomiméticos, ROVs , Gliders. Propulsão por motores elétricos, deslocamento de volume de água, velas, ondas, movimento de caudas e nadadeiras.
LocomoçÃo
Determinada pelo meio de atuação do robô móvel já que locomoção é , de fato, a interação física entre o robô e seu meio.
Locomoção Aquática
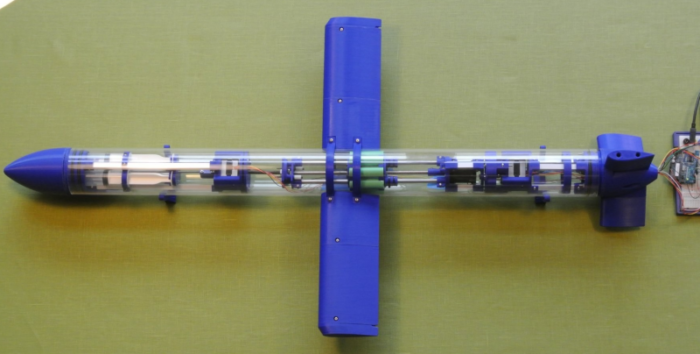
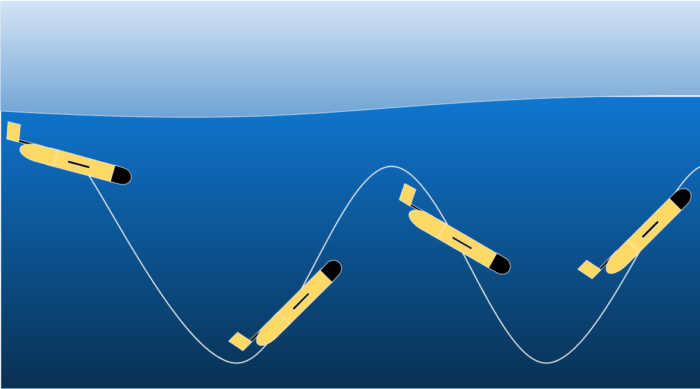
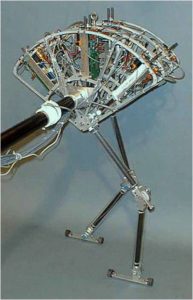
Locomoção em meio aquático é muito diversificada já que a diversidade de robôs aquáticos é muito grande. Mas um caso é muito interessante: Underwater Glider
robôs aquáticos
UAV – Underwater Autonomous Vehicle , Underwater Unmanned Vehicle ( todos os veículos submersíveis)
Locomoção mais apropriada para terrenos acidentados e irregulares. Desafios de coordenação de pernas. Quanto mais articuladas mais atuadores , mais pesado o conjunto. Muitos imitam a natureza- biomiméticos.
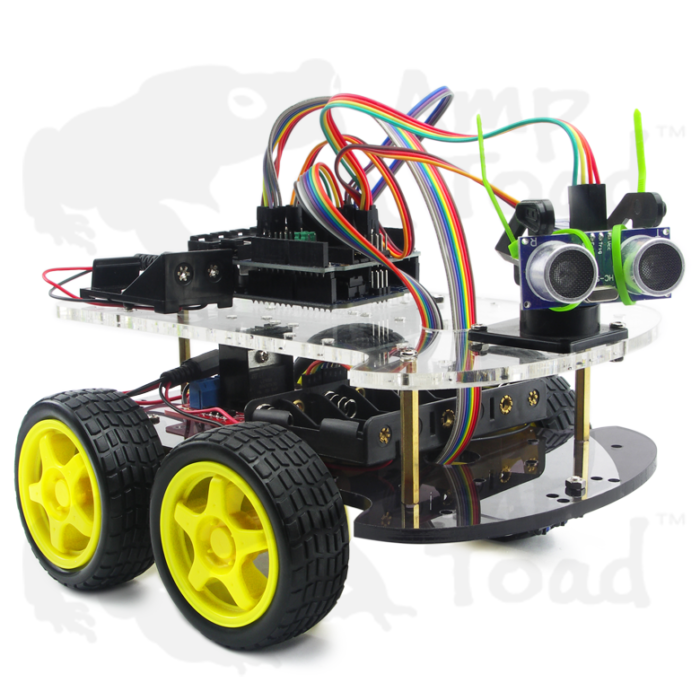
Robôs com rodas
Rodas são mais apropriadas para terrenos planos, estruturados , onde essa locomoção é mais eficiente. Nesse terreno tem-se baixo custo energético para atuação e velocidades bem superiores a pernas.
Veículos podem ser de 1 até 4 rodas em geral. Diferentes tipos de rodas e diferentes arranjos cinemáticos determinam a mobilidade e manobrabilidade do veículo.
híbridos
Esteiras ( caterpillars) , como as que se usava em tanques de guerra, são conjuntos de rodas unidos por uma correia e são muito populares em robótica pois permitem transposição de terrenos acidentados ao mesmo tempo sendo manobráveis como um arranjo de duas rodas diferenciais .
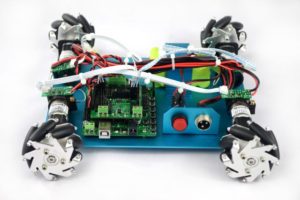
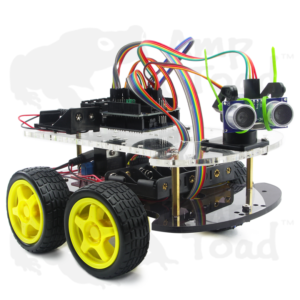
Outros: arranjos com pernas e rodas , como na figura, unem o melhor dos dois mundos
Robôs com Pernas
hoppers
Uma perna em equilíbrio dinâmico que se move saltando e direcionando o ângulo do quadril. Mais econômico pois cada perna significa mais peso e coordenação mais difícil.
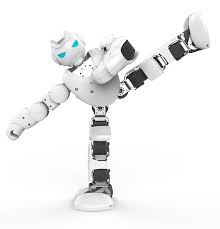
bípedes
Duas pernas , em geral são humanóides ou biomiméticos.
quadrúpedes
Quadrúpedes podem imitar a locomoção de animais quadrúpedes que usam dois tipos de marcha com equilíbrio estático ou dinâmico.
hexápodes
Seis pernas, imitando insetos, locomoção mais vantajosa com movimento de 3 pernas por vez simultaneamente. Assim a marcha sempre é dinamicamente estável , com 3 apoios, e a coordenação tem poucos eventos .
Tipos de rodas
Rodas Padrão
Rodas comuns encontradas em carros. Roda em torno do eixo central. Não desliza lateralmente
Direcionáveis: possui mais um eixo em torno do qual há movimento para direcionamento
roda castor
Roda com dois eixos de movimento , caracteristicamente distantes de d , também chamado de eixo de caster.
Rodas de carrinho de supermercado e cadeiras de escritório.
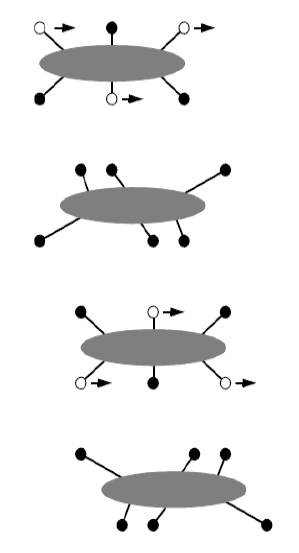
rodas suécas
Rodas cuja banda é coberta por pequenos rodízios com giro livre. Dependendo do angulo entre o eixo desses rodízios e o vetor velocidade da roda temos :
SUECA 45
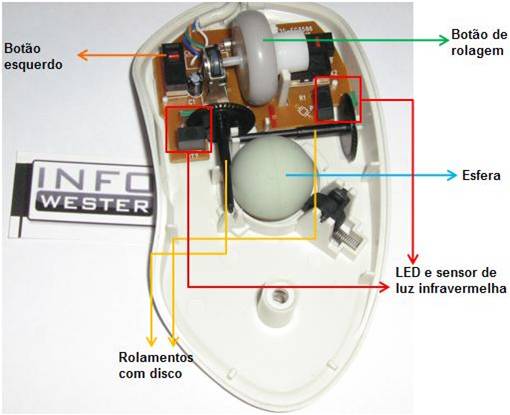
roda esférica
Usada como rodízio livre, já que é difícil de atuar e quantificar o movimento.
FIGURA DO MOUSE de bolinha
SUECA 90
arranjos de rodas
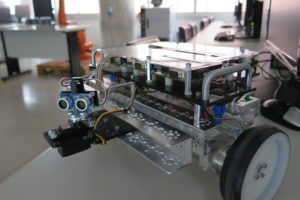
acionamento diferencial - Differential steering
O arranjo mais popular em robótica no qual as duas rodas comuns , fixas, paralelas são acionadas independentemente. A diferença causa a mudança de orientação
Triciclo e quadriciclo Ackermann
Dois conjuntos de rodas , frontal e traseiro que podem ou não ser atuados e /ou direcionáveis. Chassis Ackermann tem a particularidade de direcionar as rodas de forma desigual, formando um ângulo entre as rodas direcionáveis que estabiliza o veículo em curvas e evita forças desnecessárias aos eixos de fixação.
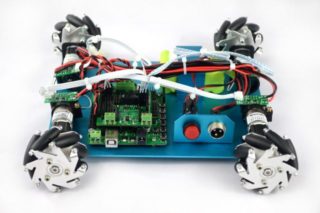
mecanum
Arranjo com 4 rodas suecas 45 dispostas em pares e com oposição angular. Dessa forma o arranjo se torna omnidirecional
Arranjo omnidirecional significa que o veículo consegue se locomover o melhor, consegue setar o vetor velocidade para qualquer direção em qualquer instante do tempo.
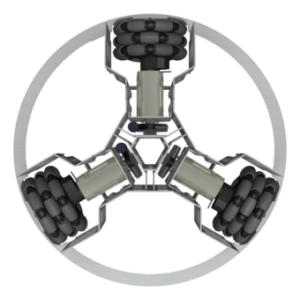
Omnidirecional 3 rodas suecas 90
Arranjo que pressupõe corpo redondo pois a sua disposição das rodas é de simetria radial.
Arranjo Synchro drive
3 rodas acionadas por 2 atuadores, com movimento pseudo-omnidirecional, um para acionar as rodas, outro para direcionar ( usando correias e polias para transmissão do movimento)
Modelagem Cinemática dos veículos
Considerações sobre posição e velocidades para se chegar a um modelo de deslocamento do veículo. Cada propulsor ou roda contribui para o deslocamento do veículo. A modelagem cinemática descreve exatamente isso.
Definições
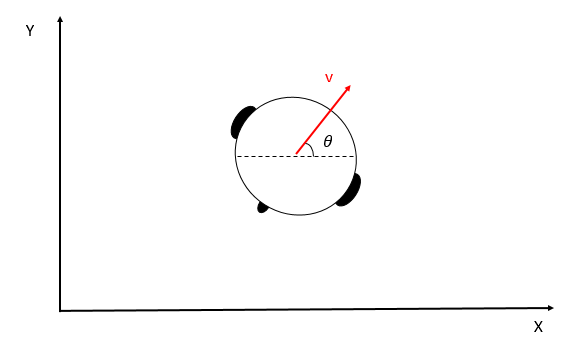
Velocidade linear:
Velocidade angular do robô:
Velocidade de rotação das rodas ( angular ) :
Ângulo de orientação do robô:
Raio da roda:
Raio do corpo do robô:
v$$\omega$$
$$\dot{\varphi}$$$$\vartheta$$
r
L
Relação entre velocidades angular e linear :$$v=\omega r$$
Equações de movimento são funções características da geometria e das velocidades do robô: $$\dot{\xi}= \left[ \dot{x} \hspace{4 pt} \dot{y} \hspace{4 pt} \dot{\vartheta} \right]^T= f ( l, r, \vartheta ,\varphi_1 , \varphi_2 )$$
Robô de acionamento diferencial
Duas rodas do tipo padrão fixas, que são acionadas independentemente. O centro do corpo está exatamente no ponto central entre as rodas.
1. Computar quanto cada roda contribui ao movimento do referencial do robô
Roda frontal direcionável ( neste caso também atuada) . As rodas traseiras são de rotação livre. O frame do robô é colocado entre as rodas traseiras.
Roda Direcionável :
No triciclo o ângulo $$\alpha$$ varia . A componente seno está orientada com a velocidade linear do robô em x (do robô). Já a componente seno se alinha não com o deslizamento lateral ( em y do robô ) , mas como velocidade tangencial à curva quando há rotação . Portanto influencia na velocidade angular do robô :
$$V_{sy}=\dot\varphi_s r sin \alpha$$
$$\omega=\dot \vartheta_ R=\frac{\dot{\varphi_s} r sin \alpha}{d}$$ A velocidade linear do robô na sua lateral ( y do robô ) é nula : $$\dot y_R=0$$
Em resumo : $$\begin{eqnarray} \dot x_R=\dot\varphi_s r cos \alpha \\ \dot y_R=0 \\ \dot\vartheta_R= \frac{\dot{\varphi_s} r sin \alpha}{d} \end{eqnarray}$$
Aplicando a transformação para coordenadas globais: