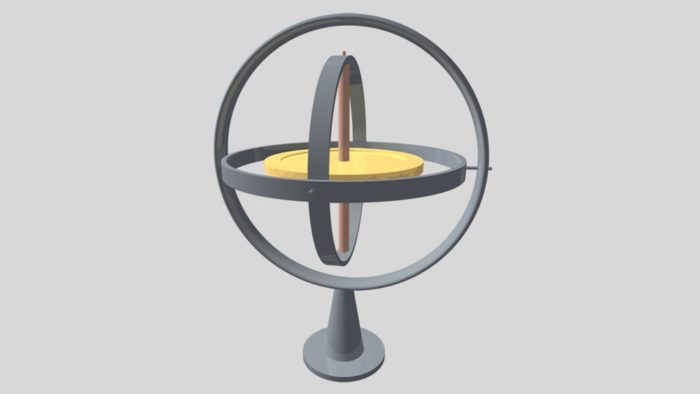
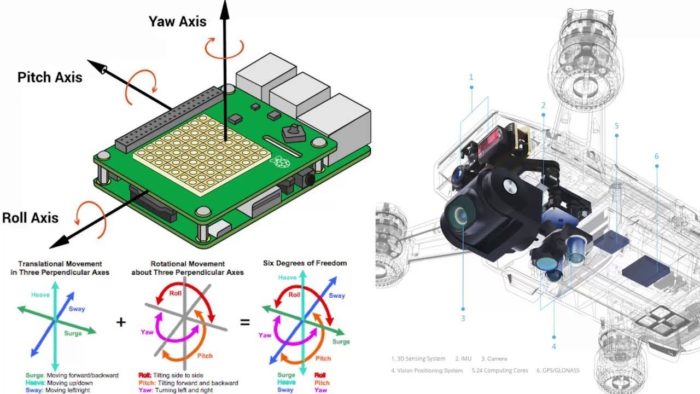
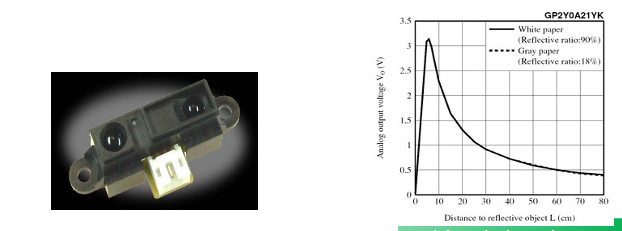
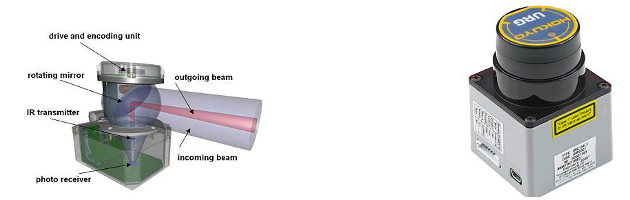
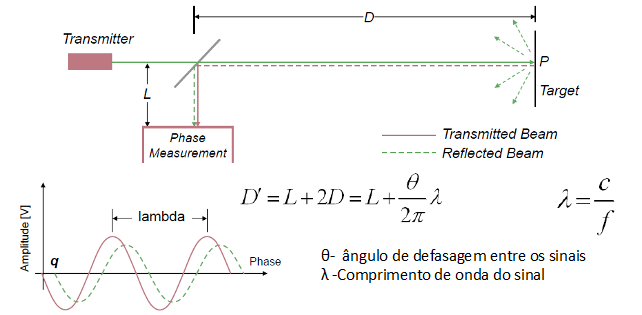
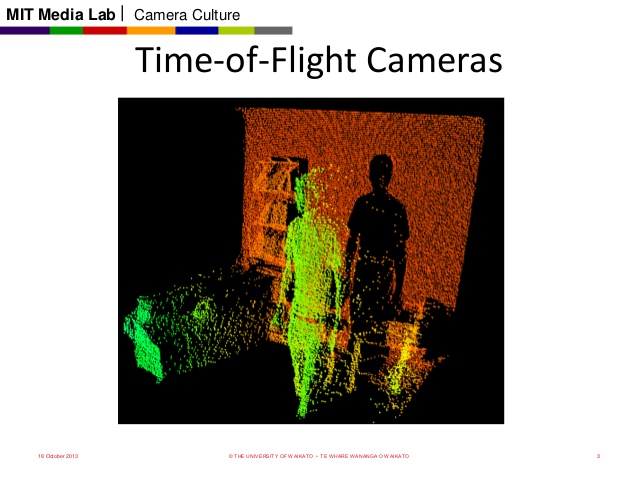
Sensores constituem a percepção de um robô móvel e são essenciais para sua autonomia e uma navegação bem sucedida. A percepção é necessária não somente do ambiente externo , mas de processos e variáveis internas, sendo imprescindível para realização da realimentação do controle. A percepção diz respeito à função primária do robô móvel que é a navegação bem sucedida, não englobando os sensores montados no robô com finalidade de execução de tarefas secundárias, como, por exemplo, no monitoramento ambiental se adicionam sondas que medem o pH , salinidade, oxigênio dissolvido na água etc. Há diversos tipos e finalidades dos sensores usados para a percepção do RMA. Entre eles sensores de distância ultrassônicos ou ópticos, encoders, acelerômetro, inclinômetro, giroscópio, sensores de pressão, sensores indutivos, capacitivos, magnéticos, detectores de intensidade luminosa, LIDAR, cameras uni ou multiobjetiva, RGBD(kinect) , etc.