Sensores constituem a percepção de um robô móvel e são essenciais para sua autonomia e uma navegação bem sucedida. A percepção é necessária não somente do ambiente externo , mas de processos e variáveis internas, sendo imprescindível para realização da realimentação do controle. A percepção diz respeito à função primária do robô móvel que é a navegação bem sucedida, não englobando os sensores montados no robô com finalidade de execução de tarefas secundárias, como, por exemplo, no monitoramento ambiental se adicionam sondas que medem o pH , salinidade, oxigênio dissolvido na água etc. Há diversos tipos e finalidades dos sensores usados para a percepção do RMA. Entre eles sensores de distância ultrassônicos ou ópticos, encoders, acelerômetro, inclinômetro, giroscópio, sensores de pressão, sensores indutivos, capacitivos, magnéticos, detectores de intensidade luminosa, LIDAR, cameras uni ou multiobjetiva, RGBD(kinect) , etc.
Variáveis e grandezas medidas:
Algumas das grandezas e variáveis mais importantes para a navegação de robôs móveis.
Velocidades linear e angular
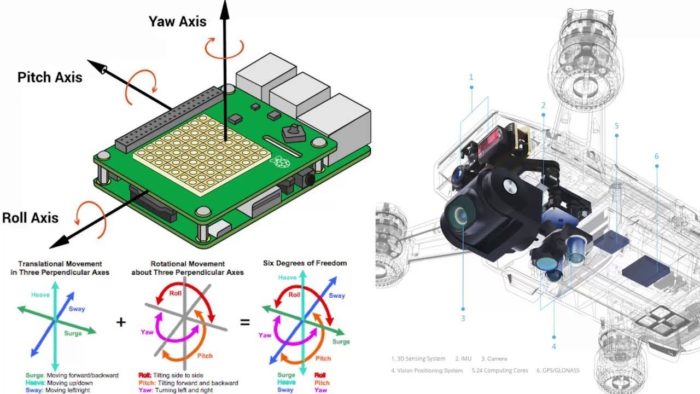
Aceleração
Estimativa de posição xyz
Estimativa de orientação
Distância
Detecção de presença de obstáculos
Marcas,sinais visuais e cores
Detecção de tags RFID
Medições de temperatura
Nível de carga da bateria
Classificação dos sensores
Proprioceptivos
Grandezas internas ao sistema de componentes e ao deslocamento do robô ( velocidade , aceleração, nível de carga, posição, orientação)
Exterioceptivos
Grandezas que envolvem a medição do ambiente externo ao robô : distância, marcas , luminosidade, temperatura ambiente etc. ( todas relacionadas à navegação )
Passivos:
Apenas fazem a leitura passiva das grandezas sem enviar nenhum tipo de sinal ao ambiente.
Ativos:
Enviam uma energia ao ambiente e esperam o retorno dessa energia, medindo -a. Por isso a maioria dos sensores de distância são denominados de active ranging sensors.
Sensores de posição e orientação
Encoders
O que é o Encoder?
Encoder é um transdutor que converte um movimento angular ou linear em um sinal digital.
Esses sinais podem ser usados para determinar velocidade, aceleração, distância, rotação, posição ou direção.
Em robótica o uso de encoders angulares (rotacionais) é mais comum. Sensores proprioceptivos, sensores ativos ou passivos : Ópticos (ativos) ou mecânicos (passivos)
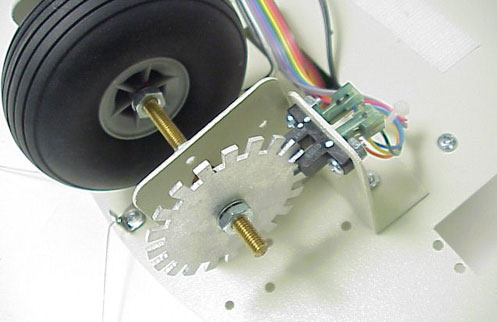
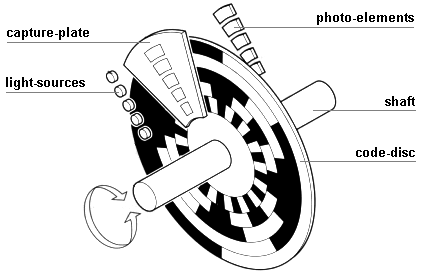
Encoder Óptico
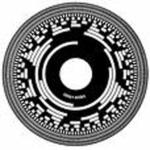
Encoder Absoluto
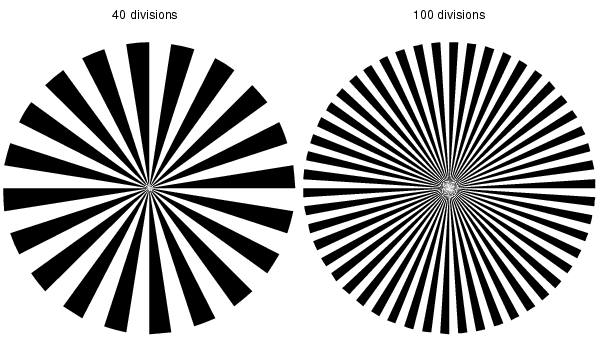
Possui um disco perfurado com um código correspondete a um certo número de bits e um conjunto de emissor-receptor de mesmo número de leds. Lê um código absoluto que é traduzido para uma posição do disco. O erro de posicionamento refere-se apenas à precisão do encoder.
Encoder incremental
Possui disco com perfuração alternada simples que gera um único pulso no leitor . O sinal então sofre um incremento relativo à última medição. Cada janela do disco representa uma incerteza associada à medição que é propagada pelo fato de leitura de uma posição ser incremental e não absoluta.
Sensores inerciais
Acelerômetro, giroscópio, inclinômetro
Acelerômetro
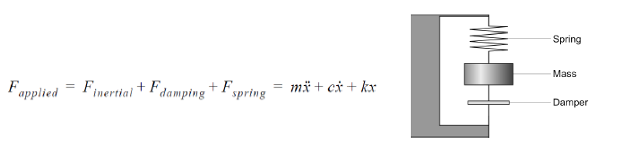
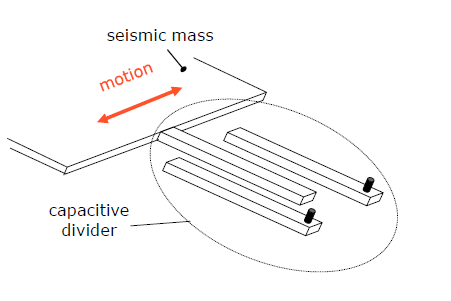
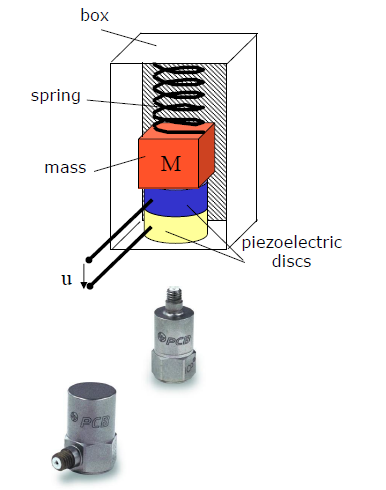
Acelerômetro é um sensor inercial que se utiliza do princípio da segunda lei de Newton aplicado a um sistema de massa oscilante ( ou massa-mola). Ele mede a aceleração do sistema, seja ela da gravidade ou externa aplicada ao sistema. Da mesma forma acelerômetro pode medir vibrações. O acelerômetro MEMS mede tanto as vibrações (aceleração dinâmica) quanto a aceleração da gravidade e sua projeção em vários eixos do sensor sendo apropriado para ser usado como inclinômetro. O acelerômetro piezoelétrico mede apenas vibrações. A medição da aceleração linear do sistema é um processo bastante sensível e sujeita a grandes ruídos devido a vibrações do sistema ( caso as vibrações não sejam a medição principal) .
Acelerômetro MEMS
Acelerômetro piezoelétrico
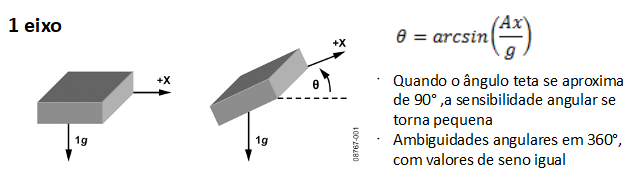
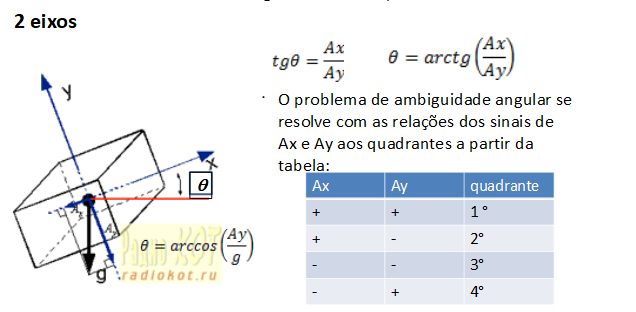
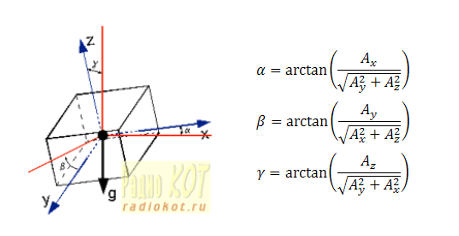
Inclinômetro
Conhecido como tilt sensor que é montado com acelerômetro de 1, 2 ou 3 eixos e mede a projeção da aceleração da gravidade g no(s) referidos eixo(s) e , portanto, o ângulo de inclinação entre eles. É uma medição angular bastante precisa visto que é um cálculo algébrico, sendo apenas influenciada pelo ruído e vibrações ( parasitas) do sistema onde este é montado.
Giroscópio
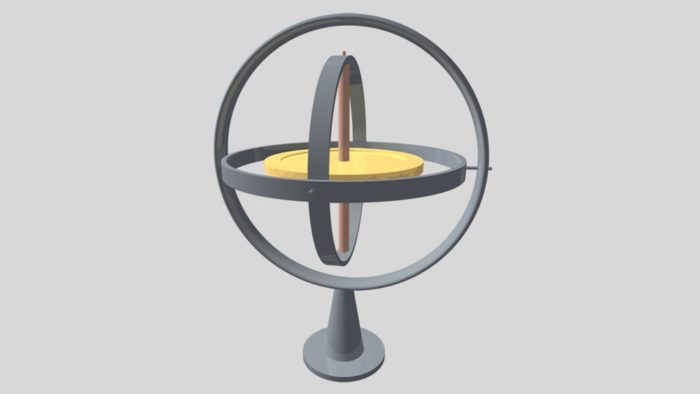
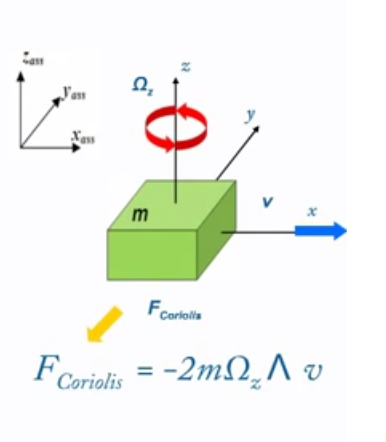
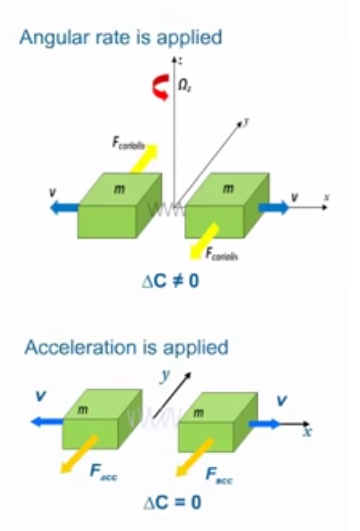
Sensor que mede VELOCIDADE ANGULAR . Há vários tipos de giroscópios como : mecânicos, MEMS, ópticos. Todos eles usam processos bastante diversos de medição da velocidade angular. Apenas o giroscópio MEMS e o mecânico são considerados sensores inerciais. Para mais informações leia o material adicional. Deixando de lado o giroscópio mecânico ( que pode também medir o deslocamento angular – gyrocompass) e no giroscópio óptico, o princípio do giroscópio MEMS se baseia na pseudoforça de Coriolis que surge quando uma massa não desprezível em movimento constante é submetida a uma rotação ( fig a.) . No sensor MEMS usa-se 2 massas oscilantes em sentidos opostos (fig. b), assim quando um movimento linear ocorre, as massas se deslocam para o mesmo lado. Quando há uma rotação, as massas são lançadas para laterais opostas.
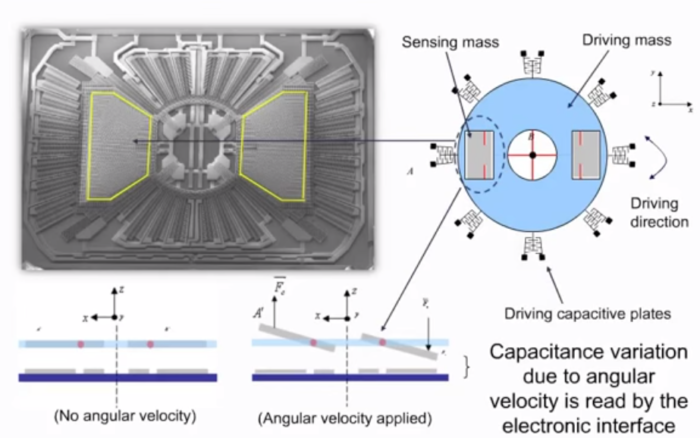
A figura abaixo é uma foto realizada por um miscroscópio eletrônico demonstrando o interior de um giroscópio MEMS, onda as massas oscilantes são em formado de asas.
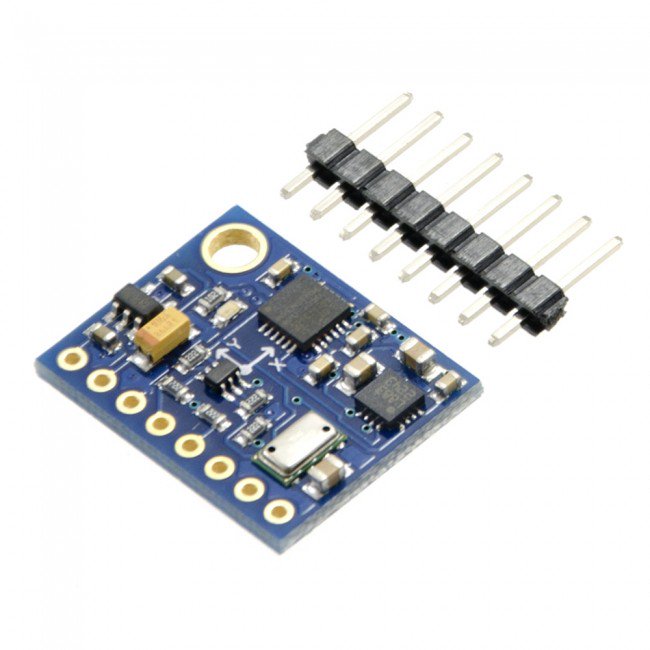
IMU- Inertial Measurement Unit
Unidades Inerciais de medição condensam vários sensores MEMS como acelerômetro, giroscópio, magnetômetro de vários eixos e barômetro. Tornaram-se populares e relativamente baratos na última década. Cada modelo tem a sua particularidade e muitos deles possuem um processamento interno e uma fusão sensorial a nível de hardware para fornecer medições mais precisas de , por exemplo, ângulos problemáticos como o yaw.
Sensores de distância
São sensores exteroceptivos de faixa ativa que emitem certo tipo de energia para o ambiente e com base no tempo da resposta, na intensidade da resposta ou deslocamento de fase da onda fornecem a medição.
Sensor utrassônico
Sensor óptico infravermelho
LIDAR- laser scanner
Cameras time of flight
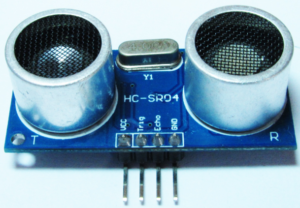
Sensor Ultrassônico
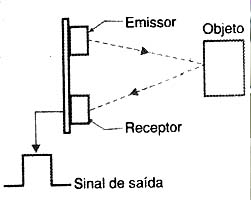
O sensor ultrassônico é um sensor reflexivo de faixa ativa, que responde a variações na quantidade de energia captada por um detector após a iteração com um alvo de interesse.
O sensor é constituído por um transmissor de ultrassom e um receptor (microfone) ultrassônico.
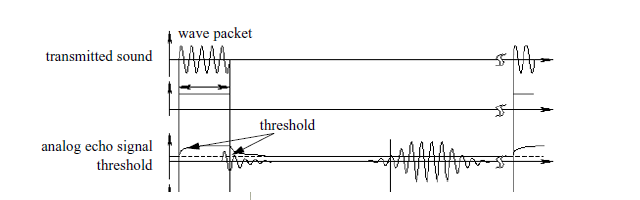
Funciona emitindo um sinal pulsado e aguardando o tempo de resposta :
Limitações são devido à frequencia de operação, cujo período é de dezenas de Propriedades acústicas do material – o material pode ser um absorvedor acústico, Ângulo de incidência – quanto mais perpendicular melhor a leitura . Geometria da superfície – pode realizar a difusão do sinal sem reflexão
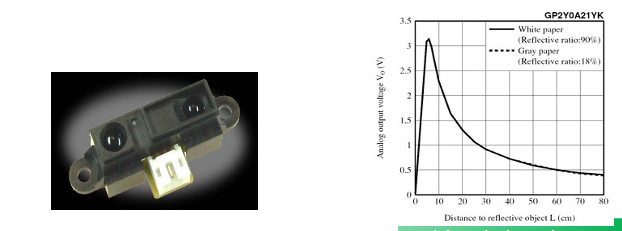
Sensor infravermelho
É constituído por um emissor e receptor de sinal óptico da faixa do infravermelho, o emissor pode ser um LED infravermelho e o receptor um fototransistor sensível a radiações neste comprimento de onda.
Quando o infravermelho atinge o receptor, este passa a conduzir corrente elétrica entre seus terminais. A curva de variação da resposta em tensão com a variação da distância está na figura abaixo.
Limitações : A leitura varia com a reflexividade do material . Materiais que não são foto-reflexivos não proporcionam leitura adequada. A geometria , assim como para o sensor ultrassônico , influencia na leitura.
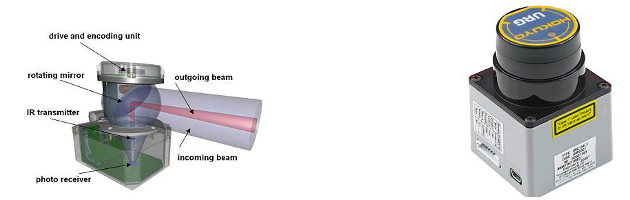
LIDAR- Laser detection and ranging
Emite feixe iluminando o objeto e recebe a resposta medindo o tempo ou a defasagem . Existem modelos que são com o feixe fixo, mas a grande maioria possui feixe rotativo para uma varredura ampla. Uma leitura do LIDAR é da ordem de picosegundos. Em 20 milisegundos , alguns modelos com o feixe rotacional fazem a varredura de 180 graus.
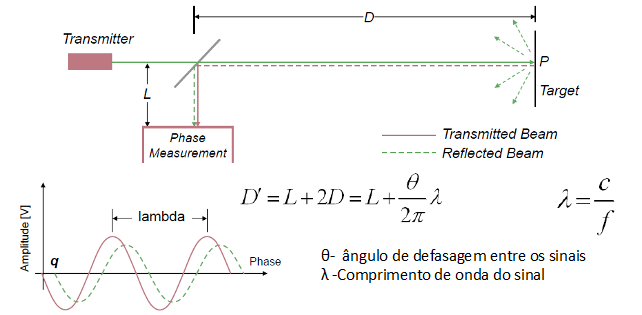
Deslocamento de Fase
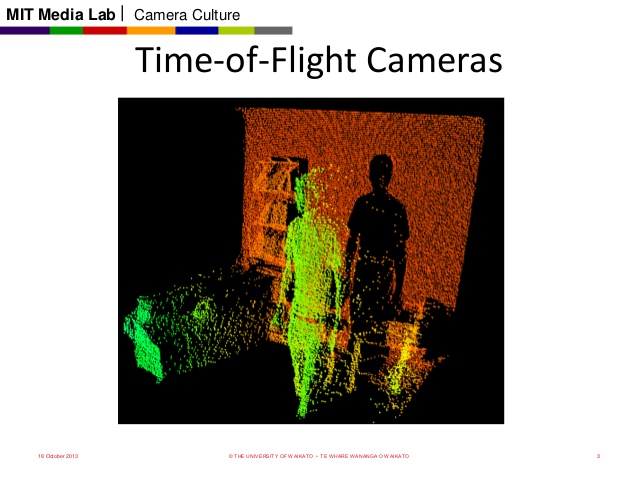
Cameras TOF- Time of Flight
Feixe de luz é enviado à cena e a imagem recebe a cada pixel uma medição de distância, formando nuvem de pontos. Resoluções variam. Utilizadas industrialmente para detecção de formas rapidamente. Equivalente ao kinect .
Aprofunde o conhecimento:
Leia os slides para aprofundar o conhecimento teórico e acesse os links indicados :